| Nguồn gốc: | Trung Quốc |
|---|---|
| Hàng hiệu: | UWC |
| Số mô hình: | UWC3500 |
| Số lượng đặt hàng tối thiểu: | 1 |
| Giá bán: | Discussible |
| chi tiết đóng gói: | hộp giấy |
| Thời gian giao hàng: | 3 ngày làm việc |
| Điều khoản thanh toán: | T/T |
| Khả năng cung cấp: | 100 mỗi tháng |
| Thời gian hoạt động API: | 0,43ms | Điện áp nguồn đầu vào: | 24VDC |
|---|---|---|---|
| Đầu ra điện áp nguồn phụ 12V: | 12.05VDC | Đầu vào / đầu ra chung của bộ điều khiển: | 2/2 |
| Đầu vào / đầu ra IN bên ngoài (Sử dụng một giao diện truyền thông RS232): | 24/24 | ||
| Điểm nổi bật: | Hệ thống đo thị lực,hệ thống đo tầm nhìn |
||
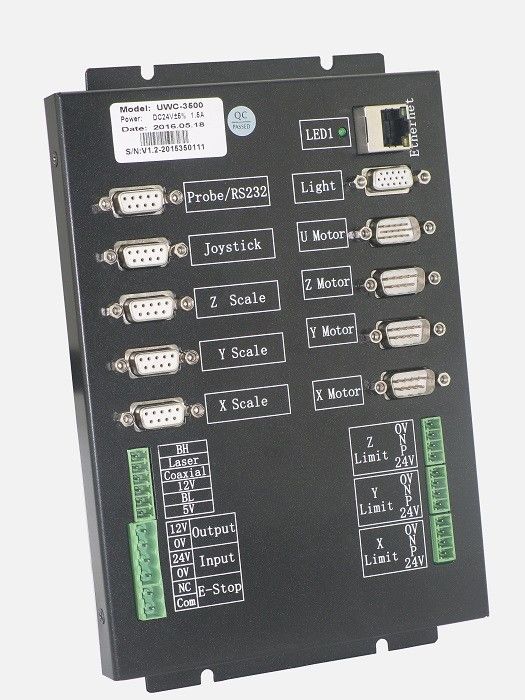
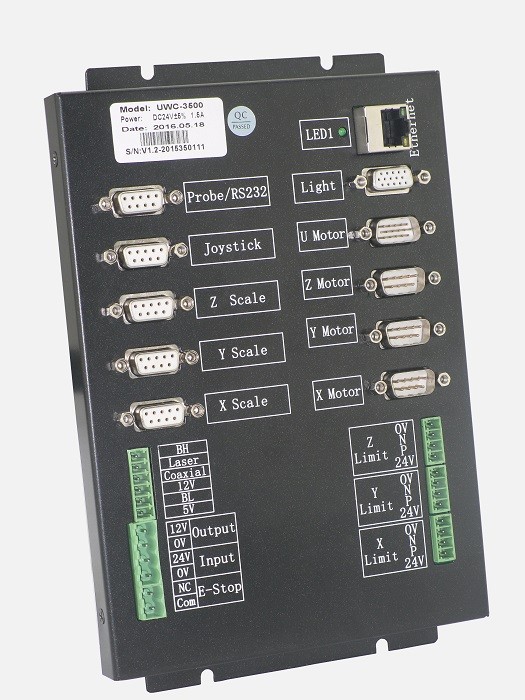
Giới thiệu
UWC 3500 là bộ điều khiển vòng khép kín 4 trục nói chung, được sử dụng trong máy đo thị lực và máy đo thị lực tổng hợp, hoặc các hệ thống đo tự động.Với phản hồi vị trí vòng gần của bộ mã hóa động cơ hoặc thang đo tuyến tính, UWC3500 có thể đạt được độ chính xác cao.
Đặc trưng:
1. Cấu trúc máy trên và dưới tiên tiến, CPU hiệu suất cao + FPGA
2. Giao tiếp: Giao diện Ethernet, thời gian chạy cho một hàm API thấp hơn 0,45ms.
3. Chế độ điều khiển hướng + Xung, có thể điều khiển động cơ bước, servo AC, servo tuyến tính hoặc DDM, v.v.
4. Điều khiển chuyển động vòng gần hoàn toàn, định vị độ chính xác cao, nhanh chóng, chính xác và ổn định.Thuật toán điều khiển vòng gần tiên tiến và rất ít tham số PID, đảm bảo dễ dàng chuyển hướng cho người sử dụng.
5. Bào đường cong tốc độ loại S, có thể thiết lập tỷ lệ phần S trong quá trình giảm tốc.
6. Định vị chiến lược:
Điều khiển vòng hở xung + hướng.
Quy mô tuyến tính / điều khiển phản hồi vị trí bộ mã hóa khép kín, thuật toán cải tiến PID + VFF, loại bỏ vấn đề dịch chuyển số 0.
7. Chế độ chuyển động:
Điểm tới điểm, chế độ JOG, chế độ homing dễ sử dụng và linh hoạt, nội suy tuyến tính 2 trục hoặc 3 trục, nội suy cung ngang, đầu dò cảm ứng và chế độ cần điều khiển.
8. Chính sách bảo mật:
Chức năng tự động điều chỉnh quay máy, tự động thiết lập logic giới hạn và hướng, các thông số động cơ và hướng phản hồi tuyến tính, đảm bảo loại bỏ lỗi chuyển động phản hồi.
Khi trục di chuyển đến gần giới hạn, có sự giảm tốc trước và trước khi di chuyển, có sự hạn chế bắt buộc của tốc độ di chuyển.
Giới hạn phần mềm được hỗ trợ.
9. Hàm API đang sử dụng tính năng đóng gói đối mặt với đối tượng, điều này giúp lập trình dễ dàng.Hầu hết các tham số được thiết lập bởi phần mềm gỡ lỗi.
10. Tích hợp cao, hiệu suất cao, sản xuất và bảo trì ổn định, dễ dàng.
11. UWC-3500 được sử dụng công nghệ sản xuất SMT, đảm bảo độ ổn định và độ tin cậy.
12. Với tính linh hoạt cao, UWC3500 phù hợp với các thiết bị phi tiêu chuẩn và cũng có thể tùy chỉnh chức năng.
13. UWC3500 hỗ trợ chức năng cập nhật firmware trực tuyến, người dùng không phải tháo bộ điều khiển ra khỏi máy, dễ dàng cập nhật và mở rộng chức năng, rút ngắn chu kỳ phát triển và quay vòng của thiết bị.
14. Mô-đun IO UWC348 bên ngoài, tối đa cho 26 trong 26 đầu ra.
15. Chức năng so sánh vị trí so sánh, có thể được kết hợp chính xác, người dùng cũng có thể đặt phạm vi kích hoạt phù hợp, đầu ra kích hoạt có thể được kết nối với máy ảnh hoặc cảm biến laser.
16. Chức năng điều khiển nguồn sáng nhấp nháy hoạt động và chức năng kích hoạt khớp vị trí CCD.
17. Bao gồm phần mềm gỡ lỗi mạnh mẽ, thao tác dễ dàng, người dùng dễ dàng xoay máy.
Thông số
| Mục | Min. | Đặc trưng | Tối đa | Đơn vị |
| Thời gian hoạt động API | 0,425 | 0,43 | 0,45 | bệnh đa xơ cứng |
| Điện áp nguồn đầu vào | 22,5 | 24 | 26 | VDC |
| Đầu ra điện áp nguồn phụ 12V | 11,76 | 12.05 | 12,24 | VDC |
| Đầu ra dòng điện phụ 12V | 0 | 2.0 | 2,5 | Một |
| Đầu ra điện áp nguồn 5V | 5.1 | 5.2 | 5,25 | VDC |
| Đầu ra dòng điện 5V | 0 | 1,8 | 2.0 | Một |
| Giao diện động cơ X / Y / Z Khả năng tải 24V | 0 | 3.0 | 4.0 | Một |
| Tần số xung hướng | - | - | 6,5 | MHz |
| Độ phân giải tần số | 0,006 | - | - | Hz |
| Phạm vi đếm tỷ lệ tuyến tính | - 2147483648 | - | 2147483647 | CNTs |
| Dải đếm xung hướng | - 2147483648 | - | 2147483647 | CNTs |
| Mức điều chỉnh tốc độ | - | - | 1.000.000.000 | DDS 32 bit |
| Độ phân giải tỷ lệ tuyến tính được hỗ trợ | -0.01 | - | 10000 | ừm |
| Tần số đầu ra tín hiệu quy mô tuyến tính | - | - | 6,5 | MHz |
| Đầu vào / đầu ra chung của bộ điều khiển | - | - | - | Phần cuối |
| Giao diện truyền thông RS232 tốc độ cao | - | 2 | - | Phần cuối |
| Đầu vào / đầu ra IN bên ngoài (Sử dụng một giao diện truyền thông RS232) | - | 24/24 | - | Phần cuối |
| Bước thúc đẩy sản lượng hiện tại | 0,07 | - | 1,15 | CÁNH TAY) |
| Phân chia bước lái xe | 16 | 16 | 16 |
|
Sự chỉ rõ
| KHÔNG. | Sự chỉ rõ | UWC3500 |
|
| 1 | Cung cấp nhân lực | Đầu vào DC24V @ 2A, đầu ra DC12V @ 2A (cấp nguồn CCD) |
|
| 2 | Đo khả năng tương thích của phần mềm | Hoàn toàn tương thích với V1.4 |
|
| 3 | Kích thước | 255 * 118 * 53 (mm) |
|
| 4 | Liên lạc | USB hoặc ethernet biệt lập (tùy chọn) |
|
| 5 | chính sách kiểm soát vòng lặp khép kín | PID + VFF + dải chết |
|
| 6 | Tần số làm mới Servo | 2,5KHz |
|
| 7 | Chống sốc cơ học, tối ưu hóa tốc độ | Chức năng thông minh | |
| số 8 | Trục đếm đầu dò tuyến tính | 3 | |
| 9 | Trục điều khiển cơ bản | 4 | |
| 10 | Trục kéo dài | Có thể thêm xung 3 trục + hướng | |
| 11 | Chế độ điều khiển trục XYZ | Xung + hướng RS422 | |
| 12 | Loại động cơ được hỗ trợ trục XYZ (với trình điều khiển động cơ bên ngoài) | Bước / AC servo / servo tuyến tính / DC servo với phản hồi bộ mã hóa | |
| 13 | Chế độ điều khiển trục U A | Kết nối RS232 với ống kính zoom tự động Pomeas | |
| 14 | Chế độ điều khiển trục U B | Trình điều khiển bước 2 pha được nhúng, hỗ trợ ống kính zoom tự động với động cơ bước, giới hạn đơn / đôi được hỗ trợ. | |
| 15 | Lập kế hoạch đường cong tốc độ | Loại thang / S | |
| 16 | Phép nội suy | Nội suy tuyến tính nhiều trục, nội suy cung 2 trục, nội suy 3 trục |
|
| 17 | Tối đaTần số xung | 5MHz | |
| 18 | Độ phân giải tần số xung | 0,001Hz | |
| 19 | Mức điều chỉnh tốc độ | 1.000.000.000 | |
| 20 | Điều khiển điện áp tương tự | - | |
| 21 | Tần số đếm của đầu dò tuyến tính | 6MHz / (Pha A hoặc B) | |
| 22 | Định nghĩa tín hiệu đầu dò tuyến tính | R hoặc S cho tùy chọn (R: 12345, S: 26789) | |
| 23 | Phần cứng đo thăm dò | Mạch giao diện thăm dò cảm ứng | |
| 24 | Mạch xử lý lỗi thăm dò | Có sẵn, tự động sửa chữa đầu dò không bị nhiễu | |
| 25 | Đầu dò tương thích | Đầu dò cảm ứng kích hoạt Renishaw / Tesa tất cả các dòng | |
| 26 | Mô-đun xử lý thăm dò | Chốt tốc độ cao thăm dò, điểm chạm điều khiển phím điều khiển tự động tạm dừng và tự động rút lui, chế độ tự động phát hiện điểm | |
| 27 | Thẻ thu thập tín hiệu cần điều khiển được nhúng | Độ phân giải 12 bit, đầu vào điện áp tương tự 0-5V, 3 nút nhấn và 3 đèn LED, bao gồm công tắc dừng khẩn cấp, bao gồm núm điều chỉnh tốc độ (sử dụng loại trừ lẫn nhau với nút 3 #) | |
| 28 | Thẻ điều khiển chiếu sáng được nhúng | 8 phần ánh sáng bề mặt + ánh sáng đáy + ánh sáng đồng trục, phần mềm điều chỉnh mức 0-200 | |
| 29 | Chức năng cài đặt cấp độ chiếu sáng | Điều chỉnh phần cứng 16 mức trong cơ sở cài đặt thông số dựa trên yêu cầu về độ sáng | |
| 30 | khả năng điều khiển ánh sáng đường viền / điều khiển ngân hàng LED | Tối đa420mA, phù hợp với hầu hết các máy du lịch lớn | |
| 31 | Giao diện chiếu sáng loại phức tạp bên ngoài | Có thể kết nối với 5 vòng ánh sáng lập trình 8 phần màu đơn, hoặc 5 vòng ánh sáng lập trình 8 phần 4 màu, ánh sáng nâng cao / xoay | |
| 32 | Giao diện I / O chung | 8 đầu vào cách ly, 5 đầu ra (tương thích ULN2803) | |
| 33 | Đồng hồ hệ thống | Không thể sửa đổi năm-tháng-ngày-giờ-phút-giây | |
| 34 | Nâng cấp chương trình cơ sở | Nâng cấp khách hàng tại chỗ, cung cấp giải pháp và cập nhật kỹ thuật nhanh chóng. | |
| 35 | Đầu nối thăm dò | Đầu nối D-DUB 9 chân, dễ đi dây hơn và ổn định hơn | |
| 36 | Đầu nối cần điều khiển | OTP6, OTP7, HC3 (Cần điều khiển nhiều phím) | |
| 37 | Xử lý dữ liệu cần điều khiển | Bộ điều khiển xử lý nội bộ dữ liệu cần điều khiển và điều khiển chuyển động, tương hỗ với chế độ điều khiển chuyển động khác, chạm vào đầu dò cần điều khiển với chức năng tự động dừng và tự động rút lui | |
| 38 | Dừng khẩn cấp bên ngoài | Nút dừng khẩn cấp điều khiển nguồn điện động cơ | |
| 39 | Lập kế hoạch đường cong tốc độ | Loại thang / S | |
| 40 | Công tắc giới hạn phần mềm | Có sẵn | |
| 41 | Điểm giảm tốc phần mềm | Có sẵn | |
| 42 | Phanh theo khoảng cách được chỉ định | Có sẵn | |
| 43 | Phần mềm gỡ lỗi được hỗ trợ | Phiên bản V4.0 trở lên (Tự động phát hiện và cài đặt thông số) |